Customer
Monterey Bay Aquarium Research Institute (MBARI)
Mission Location
Monterey Bay, California
Highlights
- Connected to Benthic moorings and instruments on the seafloor to adjust parameters
- Tracked AUVs and followed a patch of water over the horizon
- Located undersea sensors and robots as deep as 4000M
“The future of ocean research and monitoring requires the cooperation of many unmanned vehicles and instruments. The long duration and flexibility of vehicles like the Wave Glider play a key role for MBARI, allowing us to better use robotics and other sensors to advance a persistent presence in the ocean.”
The Challenge
Understanding the ocean ecosystem and biogeochemistry is complicated and requires a range of sensors to make coordinated and sustained observations. Traditional methods of ships, buoys, satellites, and undersea sensors are not sufficient. Ships and satellites are expensive. Coordination and communication with undersea assets is difficult and typically not real-time. And the duration of observations from many of these assets is limited.
The Monterey Bay Aquarium Research Institute (MBARI), founded in 1987 by David Packard, seeks to develop and apply new methods, instruments, and systems to long-standing problems in ocean science. As their collection of ocean vehicles and robots grew, they faced a new challenge: how to improve coordination and communication between surface and subsea vehicles and access to data from these systems in real-time.
The Approach
MBARI has a range of underwater vehicles and sensors that it has developed and used since its founding. However, both power and communications limited how some of these assets could be used. To address this gap, they created a hotspot payload for the Wave Glider, enabling both a disruption tolerant communications relay and the ability to find and track underwater robots and sensors.
The Wave Glider-based hotspot was created as part of MBARI’s Controlled, Agile, and Novel Observing Network (CANON) project. This multi-year project seeks to understand marine microorganism lifecycles, including plankton bloom dynamics. This required coordination and communication with multiple autonomous underwater vehicle (AUV) platforms, buoyancy gliders, drifters, and multiple ships including near-real time, coordinated observations made in the drifting Lagrangian frame.
The hotspot consists of multiple radios and an acoustic modem on the Wave Glider and enables a store and forward network that transfers data between the Wave Glider and AUVs, benthic instrument packages, and systems on shore. It achieves a high-level of reliability in the tough ocean environment where communications are frequently disrupted or degraded.
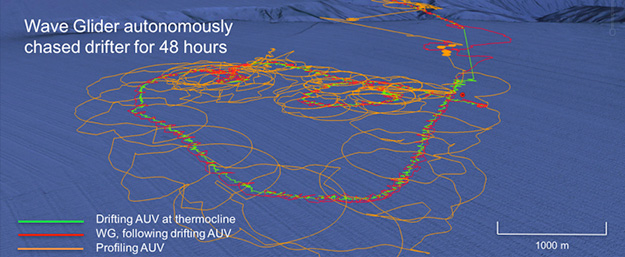
Tracks of Wave Glider hotspot (red) chasing a drifting AUV (green) to enable a Lagrangian drift sample.
The Results
MBARI has successfully used and refined this hotspot over several years enabling applications that permit coordinated robot activity and helping scientists to get better data. Three primary applications for this hotspot include:
- Gateway console – Connect to Benthic moorings and instruments on the seafloor to locate, change roles, or adjust parameters
- Track/follow AUVs – Track AUVs and or follow a patch of water over the horizon; recall a vehicle if a new mission is desired
- Geolocate – Locate undersea sensors and robots such as a profiling float at 650M or a Benthic rover as deep as 4000M
While the telemetry relay and acoustic tracking functions that the Wave Glider performs can be performed aboard a crewed ship, the cost of a ship is about 50x higher. The Wave Glider also allows MBARI to re-direct ships towards more valuable activities.
What’s Next?
MBARI plans to refine the hotspot payload to include the use of acoustics for greater AUV sensor telemetry and vehicle command and control. This could further reduce AUV surfacing time which would extend the battery and mission duration of the AUV.
MBARI uses its Wave Gliders for a range of projects and has developed other payloads such as ocean acidification to help its scientists. Potential future projects include jobs that take advantage of Wave Glider persistence and mobility and include AUV docking (for data transfer and battery replenishment), AUV tow-out and event response, and fish tag tracking. Clearly, MBARI will continue to push the boundaries of oceanography by leveraging technology to enable greater coordination and communication between ocean sensors and robots.