Validating Wave Measurements Collected by the Wave Glider
Liquid Robotics — August 15, 2018
Reliable wave data is a must for ocean operations. It can help improve weather models, provide situational awareness for vessels in an operating area, and contribute to safer offshore operations. In addition, for the Wave Glider itself, real-time wave measurements help determine how the vehicle is piloted to achieve mission success.
Traditionally, wave measurements are collected by spherical buoys that move up and down with the ocean’s surface. The Wave Glider is not a true surface following platform; it generates propulsion from the waves and moves along a programmed course. To account for this, a different wave data method offers a solution—the GPSwaves method, which uses global positioning system (GPS) measurements of horizontal motion instead of the traditional pitch-roll-heave signals used by buoys.
The Wave Glider supports two sensors for measuring and reporting wave height and spectrum. In addition to the industry standard Datawell MOSE sensor, which can be integrated onto the Wave Glider, Liquid Robotics offers a directly integrated wave height sensor and software package that uses the GPSwaves method.
Liquid Robotics has been conducting validation of this GPSwaves sensor since 2015 in consultation with waves expert Dr. Jim Thomson, Principal Oceanographer at the University of Washington Applied Physics Lab. To date, a series of trials totaling 111 days and covering the full range of open ocean conditions have been completed. Data collected has been evaluated relative to moored Datawell Waverider buoys and other third-party systems. Along the way, continuous improvements have been made to the wave height sensor, incorporating lessons learned from high-latitude experience and missions with the Australian Institute of Marine Science (AIMS) in the Great Barrier Reef.
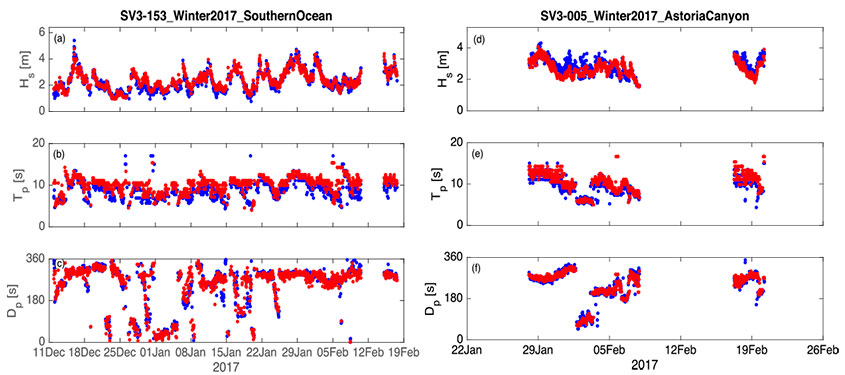
Time series of wave bulk parameters during the Southern Ocean and Astoria Canyon missions. Values are from the GPSwaves method (blue) and ground truth from the Datawell (red).
In February 2018, Dr. Thomson, Dr. Girton and the Liquid Robotics team published a peer-reviewed paper in the Journal of Atmospheric and Oceanic Technology that expands on this validation work, and evaluates the data collected by the Liquid Robotics wave height sensor on the Wave Glider.
Highlights from the validation work:
- Bulk wave parameters agree within 5% bias and error—similar to or less than the discrepancies between other commercially available wave measurement systems
- Spectral comparisons show that the bias is isolated to a mid-range of frequencies, 0.1-0.2 Hz, which is likely a result of vehicle propulsion
- Thus, the Wave Glider is demonstrated as a functional platform for ocean wave measurements
More details and data are available in the full paper, Measurements of Directional Wave Spectra and Wind Stress from a Wave Glider Autonomous Surface Vehicle.
