From Big Waves to Cold Water – Lessons Learned and Successes
Liquid Robotics — May 15, 2017
AUVSI’s annual XPONENTIAL conference is evolving from one focused on just aerial vehicles to one that encompasses all unmanned systems. This year’s event offered a great opportunity to share lessons learned and successes from multiple years of unmanned vehicle operations in remote and harsh environments. Kellie Keller, Sr. Director of Programs, and Rajesh Jha, Manager of Software Engineering, delivered the technical session. Here I’ll share a summary of what they presented at XPONENTIAL. For the full details, download the white paper.
Taking ocean measurements in 6m waves and remote locations is often best suited to unmanned vehicles. With 10 years of operations, Liquid Robotics and our partners continue to discover the value of collaboration with both customers and scientific organizations. And while many problems can be anticipated, nothing beats practical experience to illuminate ways to improve the performance of equipment in harsh environments.
Before I jump into the story, here’s a 30-second video from the float (deck) of a Wave Glider.
Wave Gliders have had years of exposure and the worst the ocean can offer, and in response we’ve engineered design changes impacting everything from communications to propulsion. For example, one can imagine how a platform might respond to being run into an iceberg, but seeing this happen in real-life and then seeing the vehicle swim away unharmed provides key validation of a robust design. And while each mission possesses its own unique challenges, missions in extreme latitudes such as the Arctic and Southern Oceans, or in areas with harsh conditions like the North Sea, have provided invaluable insights to operating unmanned systems in harsh and difficult environments.
Arctic Operations
With our customers, we have run missions in the Arctic from 2011 through 2015. Some quick statistics:
- 5 missions – 2 science, 3 commercial / industry
- 18 different vehicles on missions
- 2 generations of Wave Glider vehicles (SV2 and SV3)
- 8 different configurations of sensors and vehicles
- 900 days at sea
- 36,000 nautical miles surveyed

There are a range of challenges when operating in the Arctic with both manned and unmanned systems, especially at latitudes above 70 degrees. Key lessons learned included:
- Magnetic compasses are unreliable and can cause unexpected problems for navigation algorithms and sensors.
- Unmanned systems need the flexibility to adapt both navigation and sensors activity in real-time as well as redundancy.
- Plan for logistics challenges with deployment by building in a buffer to operational assumptions. On some missions, the teams had to deploy systems from more remote ports than previously planned. The wave powered propulsion and other platform features that allowed the conservation of power, allowed for a longer mission than originally planned.
Wave Gliders in the North Sea
Experience with operations in the Arctic and other areas such as the Southern Ocean have shaped engineering, sensor integration and mission planning efforts. In October 2016, Wave Gliders operated in the heavy sea states of the North Sea in an experiment series called MASSMO 3 (Marine Autonomous Systems in Support of Marine Observations). The MASSMO experiments are run by the UK National Oceanographic Center (NOC) and MASSMO 3 was sponsored by the Defence Science and Technology Laboratory (Dstl) which aims to ensure that innovative science and technology contribute to the defense and security of the UK. The 2016 exercise involved a fleet of up to 12 submarine gliders and unmanned surface vehicles (USVs) operating off the northwest coast of Scotland in Autumn 2016.
The unique design of the Wave Glider system allowed it to operate in conditions too dangerous and difficult for manned systems and enabled the collection of consistent measurements from multiple vehicles. Key statistics about this mission include:
- Two 3 week periods of continuous data collection
- Over 1000 km covered
- Operations up to 140 miles offshore
- METOC data from multiple sensors and vehicles
- Deterministic and dynamic navigation that allowed vehicles to stay on course
- Successful data collection in harsh sea states (7M waves and 60 mph winds)
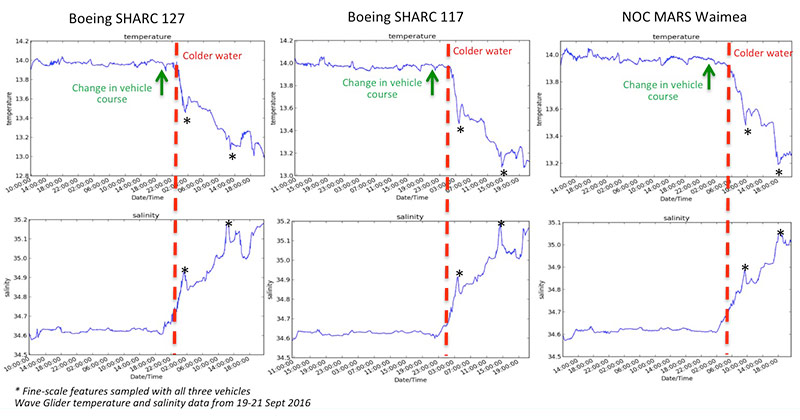
- Successful detection of tidal current reversals
The following picture shows both tactically relevant data, as well as independent and consistent measurements across vehicles.
The key to successful operations in the difficult conditions of the North Sea included:
- Operational risk assessments (ORAs) to define mission goals, risks, and contingencies
- Vehicle design and previous operational experience in rough sea states
- Real-time communication and dynamic navigation (including ship-avoidance)
- Autonomous operations in the event of communication outages
- Field tested sensor integrations and data collection processes
The Wave Gliders deployed on this mission performed well, stayed on course, and managed power per mission plans with no unplanned recoveries.
For Liquid Robotics, missions in locations such as the Arctic and North Sea have influenced platform design and sensor integration, inspired collaboration, and proven operational capabilities. Sending them farther, keeping them in operation longer, sharing data in real-time, and connecting them to other platforms or systems expands their value for customers. Achieving these goals comes through technical innovation, collaboration, and continuous improvements to operations.
The evolution of unmanned systems for the ocean is accelerating and moving from single system deployments to larger and operational deployments that involve multiple systems above and below the sea in continuous operation. As we augment and improve how dull, dirty, and dangerous work occurs, and enable new capabilities, we will see innovations that address environmental, economic, and security needs in astounding ways.
